
KINGSTON, R.I., Dec. 12, 2017—A neighborhood with 350-year-old houses is razed to make way for urban development, and decades later the imagination soars: What in the heck did those houses look like centuries ago?
A University of Rhode Island art history professor and his students have the answer thanks to a very 21st century tool: 3-D printing that allows viewers to see the houses and neighborhoods as they existed long ago.
“Virtual House, Virtual Neighborhood” is the brainchild of professor Ronald J. Onorato, and the reason he is the inaugural winner of The Winnie, a URI grant named after Winifred Brownell, former dean of the College of Arts and Sciences and a loyal supporter of the arts.
Using new digital technologies combined with traditional scholarship, Onorato’s project resurrects a historic 17th century house and neighborhood in Newport, Rhode Island, neither of which exist today.
The neighborhood—four city blocks framed by Marlborough, Thames, Farewell and Broadway streets—is almost entirely gone, demolished in the 1960s for parking lots. Only a few historic buildings remain, including St. Paul’s Methodist Church, the White Horse Tavern, and the former Newport County Jail.
Onorato, chair of URI’s Department of Art and Art History, says the project explores new ground in how preservationists can analyze and, ultimately, recreate historic neighborhoods that have disappeared.
“This is another way of thinking about preservation using traditional research methods and new imaging techniques to reimagine a place that no longer exists,” says Onorato. “Our project is important too because it’s a case study of what happened to an important early neighborhood that got destroyed—eradicated really.”
The seed for the project was planted last summer during a meeting with Shantia Anderheggen, a URI art history alumna who works for the Newport Restoration Foundation. Another preservationist, Tom Goddard, told Onorato about drawings in the foundation’s archives of a 17th century house at the corner of Marlborough and Meetings streets.
The house had been razed in the 1960s, but not before an early preservation group documented the framing structure on paper. Anderheggen and another URI art history alumna, Aemilia Techentin, provided a copy of the drawing to Onorato, who decided to recreate not only the house, but also the entire neighborhood.
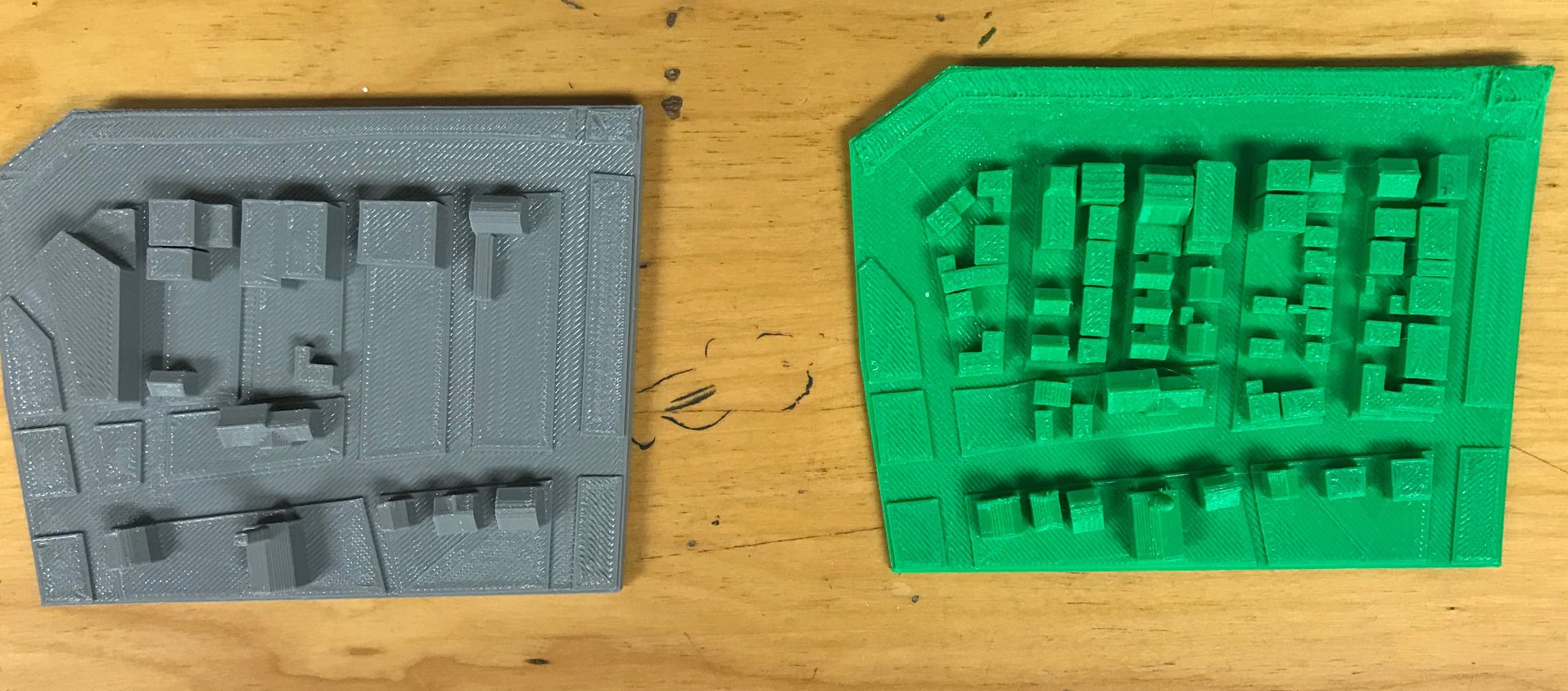
Using land evidence records, old maps, drawings, photographs and civic plat maps, Onorato and his team of current and former URI students recreated the neighborhood in its most built-out form 125 years ago using 2- and 3-D imaging. The small-scale models are charming and provide a glimpse of the neighborhood’s density centuries ago.
Over the next few months, Onorato’s students will also try to identify the men, women and children who lived in the houses, as well as the blacksmiths, tailors and other craftsmen who plied their trades in the shops. Students will use old city directories and census reports to identify names and, if possible, animate family stories.
At its peak, the neighborhood—a mix of craftsmen, Italian immigrants and rich Newport families—boasted 50 to 60 buildings. Today, fewer than 20 are left, of which eight are historic. “This neighborhood was sacrificed for commercial interests,” says Onorato. “Now it’s parking lots.”
The 3-D models are palm-sized “first drafts,” says Onorato. Larger models will be displayed during an exhibit in April at URI’s Fine Arts Center. Walter Lewis, who received his bachelor of fine arts from URI in 2017, is programming and printing the models, and Onorato’s son, Jack Onorato, who earned his bachelor of fine arts from URI in 2015, is documenting through photography the neighborhood today.
The team is calling the 17th century house the virtual house. Typical for that period, the house is a timber frame building with post-and-beam construction that involves taking wood and joining them with woodworking joints. It also has an outside hearth that doubles as a wall.
“The purpose of reconstructing the 17th century house is to give people a sense of the antiquity of this neighborhood,” says Onorato. “It’s an important and very typical 17th century building that has all but disappeared from the important architectural context of Newport.”
This kind of imaging, particularly the 3-D printing, has not been extensively used in preservation and urban study work but even in small trial runs has proven to be an effective way of demonstrating the original environment and the changes that have occurred there over 350-plus years.
Onorato’s $2,000 grant was awarded by the URI Center for the Humanities. The research will draw on and contribute to research in urban studies, history, architecture and the digital humanities, working with collections from the Newport Restoration Society, the Newport Historical Society and the Newport Public Library.
“It’s rewarding to work with such talented alums, and it’s exciting that they have the skills and creativity in both traditional and newer methods to reframe this neighborhood in such a contemporary way,” says Onorato. “Our project provides promising ideas for future collaborations.”